
Our Research
Publications
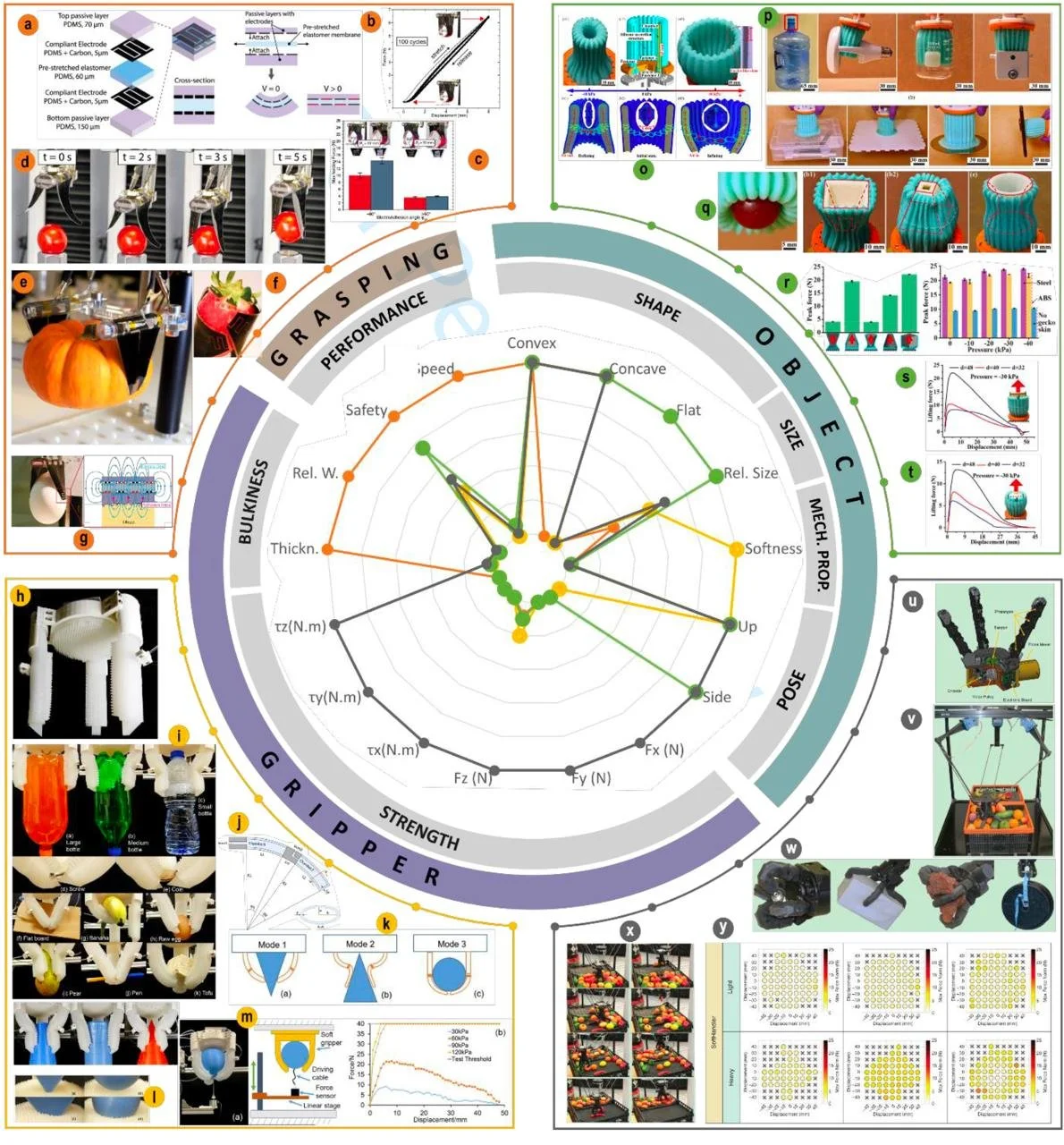
Advances in soft grasping in agriculture
Agricultural robotics faces challenges due to the variability of crops, task complexity, and dense vegetation, requiring more adaptable and safer robotic systems. Soft robotics, a promising field, aims to improve flexibility, safety, and versatility in robotic tasks, making it suitable for addressing these challenges. In agriculture, soft robots are primarily used for harvesting and crop handling, particularly with adaptive and safe grippers. This chapter reviews soft grippers' performance in agriculture and explores future directions for their systematic design.

Bio-inspired Soft Grippers for Biological Applications
Bio-inspired soft grippers are transforming biomedical applications due to their compliance, adaptability, and biocompatibility, enabling safer interactions with delicate tissues and minimally invasive procedures. This chapter provides an overview of their principles, advancements, and applications in surgeries, diagnostics, and tissue engineering, emphasizing their potential to mimic biological movements for improved patient outcomes. It also highlights key milestones in their development, challenges like biocompatibility and sterilization, and cutting-edge research inspired by nature’s designs.

Robot Learning from Demonstration to harvest apples
Learning from Demonstration (LfD) was used to teach a robot the complete task of apple harvesting by abstracting it into four steps: approaching, grasping, detaching, and placing. Two methods, Gaussian Mixture Model (GMM) with Gaussian Mixture Regression (GMR) and Hidden Markov Model (HMM) with Linear Quadratic Regression (LQR), were evaluated based on their ability to combine these phases and perform key metrics like grasp pose, detachment motion, and place pose. GMM with GMR demonstrated the highest accuracy in grasping and placing, while HMM with LQR achieved a 67% success rate, though challenges like apple shift and detachment detection remain for future improvement.